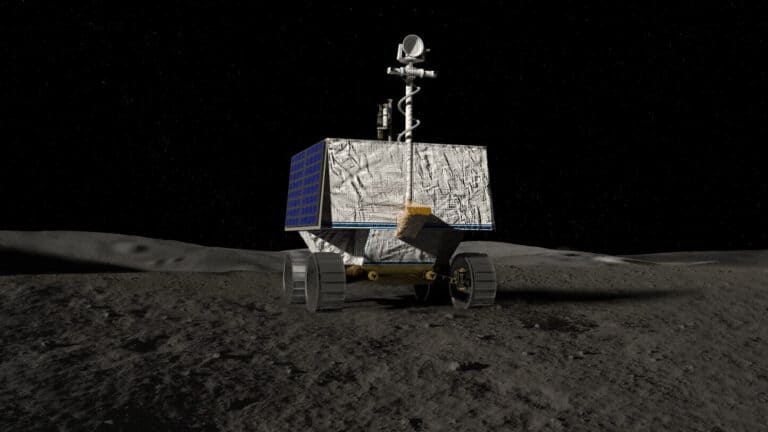
في 2023، ستقوم ناسا بإطلاق فايبر (وهو اختصار بالإنجليزية لعبارة العربة الجوالة للاستكشاف القطبي ودراسة المواد سريعة التقلب)، وهي التي ستسير على سطح القمر باحثة عن الجليد المائي الذي قد نستطيع يوماً ما استخدامه لصنع وقود الصواريخ. ستكون هذه العربة الجوالة مسلحة بأفضل الأجهزة والأدوات التي يمكن لناسا ابتكارها، مثل عجلات يمكن أن تدور بشكل مناسب على التربة القمرية، ومثقب قادر على اختراق أعماق التراكيب الجيولوجية الفضائية، وعتاد صلب قادر على تحمل 14 يوماً من الليل القمري، حيث تنخفض الحرارة إلى 173 درجة مئوية تحت الصفر.
ولكن على الرغم من أن الكثير من تجهيزات وأنظمة فايبر فريدة من نوعها ومصممة خصيصاً لهذه البعثة، فإن الكثير من البرمجيات التي ستقوم بتشغيلها مفتوحة المصدر، أي أنها ستكون متاحة للاستخدام والتعديل والتوزيع من قبل أي شخص ولأي غرض كان. وإذا نجحت البعثة، فمن الممكن أن تحقق أكثر من مجرد وضع أساسات لمستعمرة قمرية مستقبلية، فقد تكون أيضاً نقطة التحول التي ستدفع الصناعة الفضائية إلى تغيير طريقة تفكيرها في كيفية تطوير وتشغيل الروبوتات.
نادراً ما نفكر في التكنولوجيا مفتوحة المصدر عند التحدث عن البعثات الفضائية؛ حيث يجب أن نخصص كميات هائلة من الأموال إذا رغبنا في بناء شيء يمكن إطلاقه إلى الفضاء، بحيث يصل إلى الوجهة الصحيحة، ويقوم بتنفيذ مجموعة محددة من المهام على بعد مئات أو آلاف الكيلومترات أو حتى مئات الآلاف من الكيلومترات. وبالتالي، فمن الطبيعي أن نميل إلى الحفاظ على أسرار أساليب العمل والتصاميم اللازمة لتحقيق هذا الأمر.
من ناحية أخرى، فإن البرمجيات مفتوحة المصدر تترافق عادة مع البرمجة البدائية السريعة للمشاريع الأصغر، مثل مسابقات القرصنة أو العروض التجريبية الطلابية. ويوجد الكثير من مخازن تجميع المشاريع البرمجية والرماز البرمجي على الإنترنت، مثل موقع GitHub، وتمثل في أغلب الأحيان حلاً رخيصاً مناسباً للمجموعات التي تحاول بناء برامجها من الصفر ولكنها تفتقر إلى الأموال والموارد.
ولكن صناعة الفضاء دخلت مرحلة النمو المتسارع، ويعود هذا بشكل رئيسي إلى تزايد الطلب على الوصول إلى الفضاء. ويعني هذا ضرورة استخدام تكنولوجيات أقل تكلفة ويمكن الوصول إليها بسهولة، بما في ذلك البرمجيات.
وحتى بالنسبة للكيانات الكبيرة مثل ناسا، حيث لا تمثل الأموال مشكلة، فإن مقاربة البرمجيات مفتوحة المصدر قد تؤدي إلى الحصول على برمجيات أفضل. يقول ديلان تايلور، الرئيس التنفيذي ورئيس مجلس الإدارة لشركة فوياجر سبيس هولدينجز القابضة: "برأيي، فإن برمجيات الطيران المستخدمة في الفضاء متواضعة في مستواها". (والدليل على هذا: فشل الرحلة التجريبية لطائرة ستارلاينر من بوينغ في 2019، الذي تسببت فيه أخطاء برمجية) أما إذا كان البرنامج مفتوح المصدر، فسوف يتمكن أذكى العلماء من الاستفادة من خبرات وملاحظات أوساط المبرمجين والمحترفين عند وقوع أي مشكلة، تماماً كما يفعل المطورون الهواة.
وبشكل أساسي، إذا كان البرنامج جيداً بما يكفي لناسا، فمن المفترض أن يكون جيداً بما يكفي لأي شخص يحاول تشغيل روبوت على كوكب آخر. ومع تزايد عدد الشركات والوكالات الوطنية الجديدة في جميع أنحاء العالم، وبشكل مستمر، فإن الحصول على برمجيات رخيصة خاصة بالروبوتات وتستطيع تنفيذ المهام الفضائية الخطيرة بصورة موثوقة سيكون أمراً رائعاً بالنسبة لهذه المؤسسات التي تريد إطلاق أقمارها الاصطناعية ومسابرها الخاصة بها إلى الفضاء، مع الحفاظ على انخفاض التكاليف.
أيضاً، يمكن للبرمجيات مفتوحة المصدر أن تجعل الوصول إلى الفضاء أقل تكلفة؛ لأنها ستؤدي إلى معايير يستطيع الجميع الاعتماد عليها والتعامل معها. أي أنها ستقضي على التكاليف الباهظة المترافقة عادة بالبرمجة المخصصة. علاوة على ذلك، فإن أطر العمل مفتوحة المصدر تكون في أغلب الأحيان من ضمن نطاق خبرات المهندسين الجدد. يقول تيري فونج، مدير مجموعة الروبوتات الذكية في مركز أيمز البحثي التابع لناسا في ماونتن فيو بكاليفورنيا، ونائب مدير بعثة فايبر: "إذا تمكنا فقط من الاستفادة من هذه المسألة، ونجحنا في تعزيز الصلة بين ما تعلموه في الجامعة وما يمكن استخدامه في التحليق بالبعثات، فإن التعلم سيصبح أسهل بكثير. وستصبح الاستفادة المباشرة من التطورات البحثية في البعثات الفعلية أكثر سهولة بكثير".
بدأت ناسا تستخدم البرمجيات مفتوحة المصدر في الكثير من مشاريع البحث والتطوير منذ حوالي 10 أو 15 سنة، كما أنها تحتفظ بدليل كبير للغاية يتضمن جميع البرمجيات مفتوحة المصدر التي سبق أن استخدمتها. غير أن هذه التكنولوجيا لم تكد تستخدم في الروبوتات الحقيقية التي تم إرسالها إلى الفضاء. من الأنظمة التي أجرت الوكالة عليها بعض التجارب نظام تشغيل الروبوتات (روس ROS)، وهو مجموعة من أطر العمل البرمجية مفتوحة المصدر التي تشرف منظمة أوبن روبوتيكس اللاربحية (تشغل مقراً في ماونتن فيو أيضاً) على العمل عليها وتحديثها. وقد استُخدم روس في روبونوت 2، وهو الروبوت بشري الشكل الذي ساعد على إجراء الأبحاث في محطة الفضاء الدولية، إضافة إلى روبوتات أستروبي ذاتية التحكم، والتي تئز متنقلة في أرجاء محطة الفضاء الدولية لمساعدة رواد الفضاء في مهامهم اليومية.

مصدر الصورة: ناسا
سيقوم روس بتشغيل وتسهيل المهام الضرورية فيما يدعى "التحكم الأرضي في الرحلة". فسوف يتم تشغيل فايبر من قبل مختصين من ناسا سيشرفون على عملها من الأرض. وسيقوم نظام التحكم الأرضي بالرحلة بأخذ البيانات التي تجمعها فايبر لبناء خرائط وقراءات للبيئة المحيطة على سطح القمر في الزمن الحقيقي، بحيث يستطيع موجهو العربة الجوالة استخدامها لتحريكها بها بأمان. هناك أنظمة أخرى في العربة الجوالة تعتمد أيضاً على برمجيات مفتوحة المصدر، حيث يقوم برنامج يدعى نظام الرحلة الأساسي (cFS) الموجود في العربة بالإشراف على الوظائف الأساسية مثل القياسات وإدارة الذاكرة، وهو برنامج قامت ناسا بتطويره بنفسها، كما أنه متاح مجاناً على موقع GitHub. أما عمليات بعثة فايبر خارج العربة الجوالة نفسها فهي تحت إشراف برنامج أوبن إم سي تي، الذي صممته ناسا أيضاً.
وبالمقارنة مع المريخ، فإن تقليد البيئة القمرية على الأرض أمر بالغ الصعوبة، ما يعني أن اختبار العتاد الصلب والبرمجي للعربة الجوالة ليس بالأمر السهل. وبالنسبة لهذه البعثة، كما يقول فونج، سيكون من الأفضل الاعتماد على عمليات المحاكاة الرقمية التي يمكن أن تختبر الكثير من عناصر العربة الجوالة، بما في ذلك البرمجيات مفتوحة المصدر.
من الأسباب الأخرى التي دفعت إلى استخدام البرمجيات مفتوحة المصدر في البعثة: قرب القمر من الأرض بصورة كافية للتحكم في العربة الجوالة بشكل شبه آني، ما يعني أنه يمكن الاستغناء عن بعض البرمجيات في العربة نفسها وتشغيلها على الأرض بدلاً من ذلك.
يقول فونج: "لقد قررنا أن نقسم دماغ العربة الجوالة ما بين القمر والأرض. وما إن قمنا بذلك، ظهرت أمامنا إمكانات جديدة لاستخدام برمجيات لا تتعرض للإعاقة في عملها بسبب الإشعاع، والطيران العصيب، والحوسبة، ما يسمح لنا باستخدام حواسيب مكتبية تجارية عادية لتشغيلها. وبالتالي، يمكن أن نستخدم برامج مثل روس على الأرض، وهو برنامج يستخدمه الكثيرون بشكل منتظم. ولن نضطر إلى الاعتماد فقط على البرمجيات المخصصة".
لا تعتمد فايبر بالكامل على برمجيات مفتوحة المصدر؛ حيث إن نظام التحليق الموجود ضمنها، على سبيل المثال، يعتمد على برمجيات عالية الوثوقية وخاصة بناسا. ولكن، أصبح من السهل أن نتخيل أن البعثات اللاحقة ستعتمد على برمجيات مماثلة لما ستستخدمه فايبر وتزيد عليها. يقول فونج: "من المحتمل أن العربة الجوالة المقبلة من ناسا ستعمل بنظام التشغيل لينوكس".
لن يكون من الممكن استخدام البرمجيات مفتوحة المصدر في جميع الحالات. فقد تمثل مسائل الأمن والحماية مشكلة في هذه الحالة، وربما ستدفع بعض الجهات إلى تفضيل الالتزام بالتكنولوجيا الخاصة بها بالكامل، على الرغم من أن اكتشاف الأخطاء واقتراح الحلول بشكل علني من قبل المطورين هو من أهم ميزات منصات البرمجيات مفتوحة المصدر. كما يؤكد فونج أيضاً على أن بعض البعثات ستكون تخصصية أو متقدمة لدرجة كبيرة تمنع استخدام البرمجيات مفتوحة المصدر بشكل مكثف.
غير أن ناسا ليست الجهة الوحيدة التي قررت أن تتجه إلى أوساط البرمجيات مفتوحة المصدر. فقد أعلنت بلو أوريجين مؤخراً عن شراكة مع عدة مجموعات من ناسا "لتصميم برامج للذكاء الروبوتي والأتمتة الروبوتية" بالاعتماد على أطر عمل مفتوحة المصدر (رفضت الشركة الإفصاح عن المزيد من التفاصيل). ومن المرجح أن بعض المبادرات الصغيرة (مثل مؤسسة ليبر سبيس فاونديشن التي مقرها في اليونان، والتي تؤمن عتاداً صلباً وبرمجياً مفتوح المصدر لنشاطات الأقمار الاصطناعية الصغيرة) ستحوز على المزيد من الانتباه والاهتمام مع استمرار تراجع تكاليف الرحلات الفضائية. يقول برايان جيركي، الرئيس التنفيذي لأوبين روبوتيكس: "نحن نشهد ما يشبه مفعول الدومينو. فبمجرد أن تبدأ المؤسسات الكبيرة مثل ناسا بالاعتراف علناً بأنها تعتمد على هذا البرنامج، فستصبح المؤسسات الأخرى مستعدة للمجازفة والقيام بما يلزم لتحقيق نجاحها الخاص أيضاً".