
عندما يتعلق الأمر بالسباحة، فإن الأسماك تُبدي تألُّقاً وقوة لا يمكن للبشر إلا أن يحلموا بهما. ففي حين أن أسرع الأسماك تسبح بسرعة تصل إلى 112 كيلومتراً في الساعة، لم يسبق لأي إنسان أن تمكّن حتى من السباحة في الماء بسرعة 7 كيلومترات في الساعة، بل إن أسرع الغواصات تبلغ سرعتها القصوى 80 كيلومتراً في الساعة فقط.
إن الكيفية التي تتمكَّن بها الأسماك من القيام بهذا العمل الفذِّ تنطوي على شيء من الغموض، فلطالما احتار الفيزيائيون وعلماء البيولوجيا والمهندسون بشأن الحركة التموُّجية المميزة والقوى الهيدروديناميكية التي تولِّدها. وفي الواقع، فإن لديهم نظريتين للدفع الهيدروديناميكي لتفسير الأمر. وعلى الرغم من أنهما تعودان إلى الخمسينيات والستينيات من القرن الماضي، إلا أنه لم يعرف أحدٌ أيَّ النظريتين هي الصحيحة.
ولكن ذلك يتغيَّر الآن بفضل بحث تينغيو مينغ (في مركز بكين لأبحاث العلوم الحاسوبية في الصين) وغيره من الزملاء؛ إذ قام هؤلاء الباحثون بإعداد نموذج لدفع الأسماك على جهاز كمبيوتر عملاق ومعايرة النتائج باستخدام قياسات مفصَّلة لحركة الأسماك الحقيقية. ويشرح نموذجهم لأول مرة كيفية توليد الأسماك لقوة الدفع، وحتى سبب كون بعض الهياكل التشريحية -مثل الأوتار- مهمة للغاية.
ولنتحدث أولاً عن بعض المعلومات السياقية. في حركة السباحة التموُّجية المميزة للأسماك، تتقلَّص العضلات بشكل متعاقب على طول الجسم لتوليد موجة تتحرك إلى الخلف من انحناء الجسم، ويؤدي هذا الأمر إلى الدفع بشكل معاكس للماء وتوليد قوة الدفع.
ولكن كيفية نشوء قوة الدفع هذه تنطوي على شيء من اللغز؛ ففي عام 1952، درس الفيزيائي البريطاني جيفري تايلور تفاعل كل قطعة من جسم السمكة مع الماء، وكانت فكرته هي أن كل قطعة تولّد قوة سحب (أي مقاومة للحركة)، ومع تموّج القطعة تكون قوة السحب هي الأكبر في الاتجاه العمودي مع الجسم بالمقارنة مع الاتجاه الموازي له، وتكون النتيجة هي قوة دفع في الاتجاه الموازي، أو إلى الأمام. وتعرف هذه الفكرة باسم: نظرية القوة المقاومة.
ولكن في عام 1960، طرح عالم الرياضيات البريطاني جيمس لايتيل فكرة مختلفة يكون فيها التأثير السائد هو عطالة الماء. وهذا يسمح لصفيحة مسطَّحة أن تولّد الدفع من خلال التموّج وفق مدى صغير. وتعرف هذه النظرية باسم: نظرية الجسم الممدود.
إن الفرق الرئيسي بين هاتين النظريتين هو نوع القوة المتولّدة، فهي بالنسبة لتايلور قوة مقاومة تعمل في الاتجاه المعاكس لحركة الجسم ولكنها تتوافق مع تلك السرعة، أما بالنسبة إلى لايتيل فهي قوة تفاعلية تعمل في الاتجاه المعاكس لقوة العمل وتتوافق مع التسارع.
وقد يبدو ذلك اختلافاً دقيقاً، ولكنه الأساس لفهم قوة دفع الأسماك ولإعادة توليدها بشكل اصطناعي، وهذا هو السبب في أهمية معرفة النظرية التي يجب استخدامها.
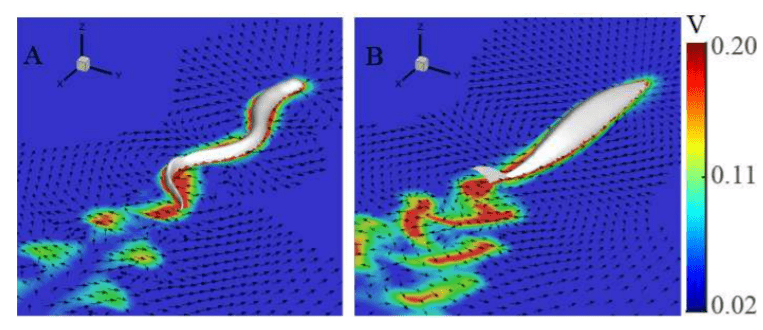
ولمعرفة ذلك، قام تينغيو وزملاؤه بتصميم نموذج حاسوبي ثلاثي الأبعاد لديناميكيات السوائل لنوعين من الأسماك: الأسماك ثعبانية الشكل (مثل الأنقليس) والأسماك الروبوتية (مثل الماكريل). والفرق الرئيسي هو أن الأسماك ثعبانية الشكل تقوم بتمويج أجسادها بالكامل، في حين ينحني النصف الخلفي فقط بشكل كبير من جسم الأسماك الروبوتية.
وقد استخدم الفريق دراسات حقيقية لحركة الأسماك لمعايرة النماذج ثم حسبوا القوة والعزم والطاقة المتولِّدة عن كل نوع من شكل الجسم.
وتعدُّ النتائج مثيرة للاهتمام؛ إذ اتضح أن كلا النظريتين صحيحتان، ولكن للأشكال المختلفة من الأجسام، بل حتى للأجزاء المختلفة من هذه الأجسام.
فعلى سبيل المثال، بالنسبة لكلا النوعين من أسماك الأنقليس والماكريل، تكون قوى المقاومة أكثر أهمية في الجزء الأوسط من الجسم، الذي يكون أملساً ومنتظماً نسبياً، ولكن القوى التفاعلية تلعب دوراً أكبر بكثير بالقرب من ذيل الأسماك من نوع الماكريل.
وتلعب المرونة دوراً مهماً أيضاً؛ إذ لم يتمكن أي شخص من قياس مرونة أجسام الأسماك وهي تسبح، ولكن هناك إجماع على أن المرونة يجب أن تساعد في تخزين الطاقة وتحسين كفاءة السباحة.
ويقدِّم نموذج تينغيو وزملاؤه بعض الأفكار هنا أيضاً، من خلال إظهار كيف تختلف المرونة باختلاف القوة والطاقة المتولِّدة عن الجسم. ويوضِّح الباحثون كيف يجب أن تصبح أسماك الأنقليس والماكريل مرنة في أماكن مختلفة في أجسامها وفي نقاط مختلفة خلال كل دورة تموُّجية. ويقولون: "تتفق هذه الملاحظة مع نتائج الدراسات السابقة بأن المرونة المناسبة يمكن أن تحفظ الطاقة وتستعيدها لتحسين الكفاءة".
وهذا يثير السؤال عن كيفية حدوث نقل الطاقة هذا من خلال أجسام الأسماك؛ حيث إن إحدى الخصائص التشريحية المحيِّرة للأسماك من نوع الماكريل هي أن لديها أوتاراً تمتد على طول جسمها نحو ذيلها، وإذا كانت كل فقرة تعمل كوحدة مستقلة كما تقترح نظرية تايلور، فلن يكون هذا النوع من الأوتار ضرورياً. ولكن في النموذج الجديد الذي طوَّره تينغيو وزملاؤه، فإنه مطلوب تماماً، حيث يقولون: "إننا نفترض بأن هذه الأوتار الطويلة تُستخدم لنقل الطاقة".
ويعدّ هذا البحث مثيراً للاهتمام، ليس فقط لأنه يقدِّم نظرة تفصيلية إلى أحد أكثر أشكال قوة الدفع شيوعاً في العالم الطبيعي، بل اتضح أن قوة الدفع عند الأسماك هي أكثر تعقيداً بكثير مما كان يعتقد سابقاً، ومن المفترض أنه يصعب إعادة توليدها بشكل اصطناعي.
ولكن بحث تينغيو وزملاؤه يقدِّم طريقة نحو الأمام للمهندسين البيولوجيين الذين يأملون في إعادة توليد قوة دفع الأسماك في الأجهزة الاصطناعية، وقد يستطيع ذلك يوماً ما أن يساعد الغواصات على السفر بشكل أسرع أيضاً. أما البشر فما يزال أمامهم الكثير ليصلوا إلى هذا المستوى!
المرجع: arxiv.org/abs/1812.02410:
How fish power swimming: a 3D computational fluid dynamics study