عندما اصطحب أناني أغراوال كلبه للمشي صعوداً وهبوطاً على الدرج في المتنزه المحلي قرب جامعة كارنيغي ميلون، توقفت جميع الكلاب الأخرى مذهولة في مكانها.
وهذا لأن كلب أغراوال كان آلياً، بل كان كلباً آلياً مميزاً أيضاً. فخلافاً للروبوتات الأخرى، والتي تميل إلى الاعتماد على خرائط داخلية للتنقل بدرجة كبيرة، يعتمد هذا الكلب على كاميرا خاصة به. أما أغراوال، وهو طالب دكتوراة في جامعة كارنيغي ميلون، فهو واحد من مجموعة باحثين قامت بتطوير تقنية تتيح للروبوتات المشي على تضاريس وعرة باستخدام الرؤية الحاسوبية والتعلم المعزز. ويأمل الباحثون بأن عملهم سيساعد على زيادة سهولة استخدام الروبوتات في العالم الحقيقي.
نحو سهولة أكبر في استخدام الروبوتات في الحياة اليومية
وخلافاً للروبوتات الموجودة في الأسواق حالياً، مثل الروبوت سبوت من بوسطن دايناميكس (Boston Dynamics)، والذي يتنقل باستخدام خرائط داخلية، فإن هذا الروبوت يعتمد على الكاميرات وحدها لتوجيه حركاته في الخارج، كما يقول أشيش كومار، وهو طالب دراسات عليا في جامعة بيركلي في كاليفورنيا، وهو أحد مؤلفي الورقة البحثية التي تصف هذا العمل، والتي سيتم تقديمها في مؤتمر حول التعلم الروبوتي قريباً. لقد كانت الطرائق الأخرى التي تعتمد على الإشارات الواردة من الكاميرات لتوجيه الروبوت مقتصرة على التضاريس المستوية، ولكن الطريقة التي ابتكرها الباحثون مكّنت الروبوت من صعود الأدراج، وتسلق الصخور، والقفز فوق الحفر.
اقرأ أيضاً: شاهد هذا الكلب الروبوتي الذي تمكن من تعلم المشي بنفسه
تدريب الروبوت
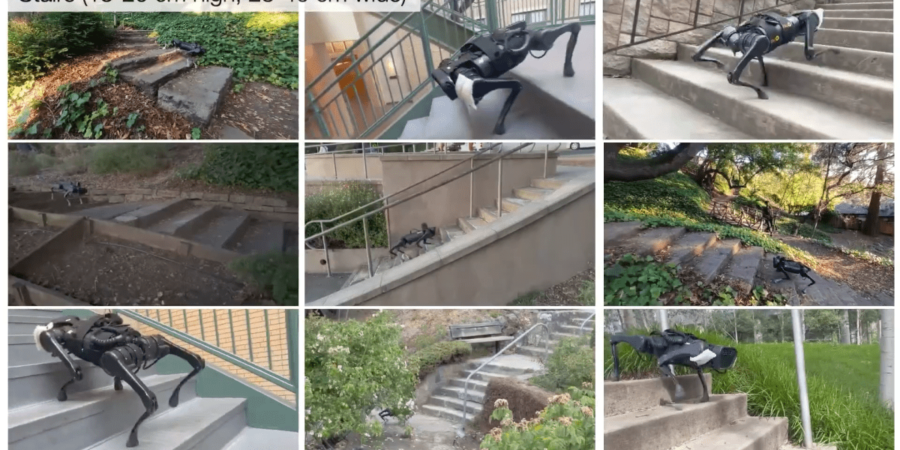
يتم تدريب الروبوت رباعي القوائم أولاً على التحرك في البيئات المختلفة ضمن برنامج محاكاة، بحيث تصبح لديه فكرة عامة عن المشي في متنزه أو الصعود والهبوط على الدرج. وعندما يوضع في العالم الحقيقي، تقوم الإشارات المرئية من كاميرا واحدة في مقدمة الروبوت بتوجيه حركاته. ويتعلم الروبوت كيفية تعديل مشيته للتحرك على أسطح مثل الأدراج والأرض غير المستوية باستخدام التعلم المعزز، وهي تقنية في الذكاء الاصطناعي تقوم على تحسين الأنظمة عن طريق التجربة والخطأ.
إن التخلي عن الخرائط الداخلية يجعل الروبوت أفضل، لأنه لم يعد مقيداً بالأخطاء التي يمكن أن ترد ضمن الخريطة، كما يقول ديباك باثاك، وهو أستاذ مساعد في جامعة كارنيغي ميلون، وأحد أفراد الفريق.
من الصعب للغاية على الروبوت تحويل البيكسلات الخام من الكاميرا إلى حركات دقيقة ومتوازنة بشكل يتيح له التحرك ضمن البيئة المحيطة، كما يقول جاي تان، وهو عالم باحث في جوجل (Google)، ولم يشارك في هذه الدراسة. ويقول إن هذا العمل يمثل المرة الأولى التي رأى فيها روبوتاً صغيراً ومنخفض التكلفة ويتمتع بقدرة كبيرة على الحركة في الوقت نفسه.
ويقول غوانيا شي، وهو باحث في جامعة واشنطن، ويدرس التعلم الآلي والتحكم الروبوتي، ولم يشارك في هذا البحث أيضاً، إن الفريق تمكن من تحقيق "إنجاز كبير في مجال التعلم الروبوتي والأتمتة".
وتتفق أكشارا راي مع وجهة النظر هذه، وهي عالمة باحثة في قسم الذكاء الاصطناعي في فيسبوك (Facebook)، وتعمل في مجال التعلم الآلي والروبوتات، ولم تشارك في هذا البحث.
وتقول: "يمثل هذا العمل خطوة واعدة نحو بناء روبوتات متحركة على القوائم وتتمتع بقدرات كبيرة على التعامل مع محيطها، واستخدامها في مختلف أنواع البيئات العملية".
ولكن، وعلى الرغم من أن عمل الفريق يمثل إنجازاً في تحسين كيفية مشي الروبوت، فإنه لا يساعد الروبوت في تحديد اتجاهه على نحو مسبق، كما تقول راي. وتضيف: "أن تحديد الوجهة أمر ضروري لاستخدام الروبوتات في العالم الحقيقي".
اقرأ أيضاً: ماذا تعرف عن الروبوت لايكا غو؟
ويجب على الفريق بذل المزيد من الجهد قبل أن يتمكن الروبوت من السير بثقة كاملة في المتنزه، أو إحضار الأشياء في المنزل. وعلى حين أن الروبوت قد يستطيع استشعار العمق والمسافة عبر الكاميرا الأمامية، إلا أنه لا يستطيع التكيّف مع أوضاع خاصة، مثل الأرض الزلقة أو العشب الطويل، كما يقول تان، كما يمكن أن يدخل في برك الماء، أو يعلق في الوحل.