تبين هذه المخلوقات مدى الترابط بين الذكاء وشكل الجسم، وهو ما يمكن أن يفتح احتمالات جديدة في الذكاء الاصطناعي للروبوتات. بدت هذه المخلوقات كسلطعونات غير محددة الشكل ومصنوعة من النقانق، أو ربما أقرب إلى يد مقطوعة من أحد أفلام الرعب. ولكن هذه "اليونيمالات" (unimals) (وهو اختصار لعبارة "حيوانات عامة universal animals") يمكن أن تكون في الواقع مفيدة للباحثين في تطوير ذكاء أكثر عمومية للآلات.
العلاقة بين الذكاء وشكل الجسم
ويقوم أغريم غوبتا من جامعة ستانفورد مع زملائه (بما فيهم في في لي، والتي تشارك في إدارة مختبر الذكاء الاصطناعي في جامعة ستانفورد، والتي قادت أيضاً تأسيس قاعدة البيانات "إيماج نت"(ImageNet)) باستخدام هذه اليونيمالات لدراسة سؤالين يتجاهلهما باحثو الذكاء الاصطناعي في أغلب الأحيان: كيف يرتبط الذكاء بشكل الجسم، وكيف يمكن تحسين القدرات عن طريق التطوير إضافة إلى التعلم.
يقول جوش بونغارد، والذي يدرس الروبوتات التطورية في جامعة فيرمونت، ولم يشارك في هذا العمل: "يمثل هذا العمل خطوة هامة في محاولات امتدت على عقود كاملة من الزمن لفهم العلاقة بين الجسم والدماغ في الروبوتات".
ويقول غوبتا إنه إذا كان الباحثون يرغبون ببناء الذكاء في الآلات، فمن المحتمل أنه قد فاتهم شيء ما. ففي البيولوجيا، ينشأ الذكاء من عمل العقول والأجسام بشكل مشترك. وتمثل بعض النواحي في شكل الجسم، مثل عدد وشكل الأطراف، عوامل مؤثرة على ما تستطيع الحيوانات فعله وما تستطيع تعلمه. وكمثال على هذا، يكفي النظر إلى حالة الآي-آي، وهو حيوان ليمور بإصبع أوسط تطور حتى يصبح أطول ويسمح له بسبر الثقوب والفتحات بحثاً عن الطعام.
غالباً ما يركز الذكاء الاصطناعي على جزء واحد من الذهن، ما يسمح ببناء آلات تستطيع القيام بمهام يمكن إتقانها دون وجود الجسم، مثل استخدام اللغة والتعرف على الصور وممارسة ألعاب الفيديو.
ولكن هذه الطريقة المحدودة قد تصبح باطلة قريباً جداً. حيث يمكن وضع أنظمة الذكاء الاصطناعي في أجسام مصممة للقيام بمهام محددة، ما يسمح لها بتعلم نطاق واسع من المهارات الجديدة بسهولة. يقول بونغارد: "الجسم هو الشيء الوحيد المشترك بين جميع الحيوانات الذكية على وجه هذا الكوكب، إن التجسيد هو أملنا الوحيد في صنع آلات ذكية وآمنة في نفس الوقت".
ما هي اليونيمالات؟
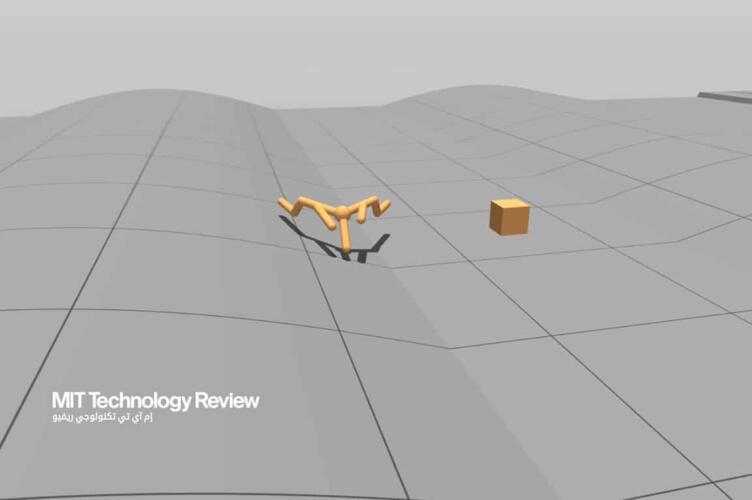
تتألف اليونيمالات من جسم وعدة أطراف. ولرؤية ما يمكن أن تفعله، قام الفريق بتطوير تقنية تدعى التعلم المعزز التطوري العميق (DERL). يتم تدريب اليونيمالات في البداية باستخدام التعلم المعزز لإتمام مهمة في بيئة افتراضية، مثل عبور عدة أنواع مختلفة من المناطق، أو تحريك جسم ما.
بعد ذلك، تُختار اليونيمالات الأفضل أداء وتُعرّض لبعض التحولات، وتوضع عناصر السلالات الناتجة في البيئة الافتراضية مرة أخرى، حيث ستتعلم نفس المهام بدءاً من الصفر. وتُكرر هذه العملية مئات المرات: التطور ومن ثم التعلم، التطور ومن ثم التعلم. وتتضمن التحولات التي تُعرض لها اليونيمالات إضافة أو إزالة الأطراف، أو تغيير طول أو مرونة الأطراف.
ويصل عدد التشكيلات المحتملة للأجسام إلى مستويات هائلة، حيث يوجد 10 للقوة 18 من الاحتمالات الممكنة بعشر أطراف أو أقل. ومع مرور الوقت، تتكيف أجسام اليونيمالات للتعامل مع مهام مختلفة. فقد تطورت بعض اليونيمالات للتحرك على المناطق المنبسطة عن طريق السقوط إلى الأمام، وتطور بعضها الآخر للتحرك بطريقة أشبه بالسحالي، على حين طور غيرها ملاقط للإمساك بالصناديق. كما اختبر الباحثون أيضاً مدى قدرة اليونيمالات المتطورة على التكيف مع المهام التي لم ترها من قبل، وهي ميزة أساسية في الذكاء العام.
كيف ستساعدنا اليونيمالات على فهم العلاقة بين البيئة التطورية ومهارات التعلم؟
تبين أن المخلوقات التي تطورت في بيئات أكثر تعقيداً تتضمن عوائق أو مناطق وعرة أسرع في تعلم المهارات الجديدة، مثل دحرجة كرة بدلاً من دفع صندوق. كما تبين أن التعلم المعزز التطوري العميق اختار أشكال الأجسام التي تتعلم بشكل أسرع، على الرغم من عدم وجود دافع انتقائي لهذا.
يقول غوبتا: "لقد وجدت هذه النتائج مثيرة للاهتمام، لأنها تبين عمق الصلة بين شكل الجسم والذكاء". ويقول بونغارد: "من المعروف مسبقاً أن بعض الأجسام تسرع عملية التعلم، ويبين هذا العمل أن الذكاء الاصطناعي يمكن أن يبحث عن هذه الأجسام".
قام مختبر بونغارد بتطوير أجسام روبوتية يمكن تكييفها للقيام بمهام معينة، مثل طلاء الأقدام بمادة تشبه الجلد المتقرن للتخفيف من الاهتراء والبلى. ويقول بونغارد إن غوبتا وزملاءه طوروا هذه الفكرة. "لقد بينوا أن الجسم الصحيح يمكن أيضاً ان يسرع التغيرات في دماغ الروبوت".
في نهاية المطاف، يمكن لهذه الطريقة أن تعكس طريقة تفكيرنا حول بناء الروبوتات الحقيقية، كما يقول غوبتا. فبدلاً من البدء مع جسم بتركيبة محددة وتدريب الروبوت على أداء مهمة معينة، يمكن استخدام تقنية DERL للسماح للتركيبة المثالية لهذه المهمة بالتطور، ومن ثم بنائها.
تمثل يونيمالات غوبتا جزءاً من نقلة كبيرة في كيفية تفكير الباحثين بالذكاء الاصطناعي. وبدلاً من تدريب أنظمة الذكاء الاصطناعي على القيام بمهام معينة، مثل ممارسة لعبة غو أو تحليل صور المسح الطبية، فقد بدأ الباحثون بإجراء الاختبارات ضمن البيئات الافتراضية، مثل "بويت" (POET)، وهي حلبة لعبة غميضة افتراضية لمختبر "أوبن إيه آي" (OpenAI)، أو ملعب "إكسلاند" (XLand) الافتراضي لشركة "ديب مايند" (DeepMind)، وذلك لدفع أنظمة الذكاء الاصطناعي إلى تعلم كيفية حل عدة مهام في ساحة تدريب مفتوحة ومتقلبة على الدوام.
وبدلاً من إتقان تحدٍّ واحد، تتعلم أنظمة الذكاء الاصطناعي بهذه الطريقة إتقان مهارات عامة. وبالنسبة لغوبتا، فإن الاستكشاف الحر سيكون مفتاح الجيل الجديد من أنظمة الذكاء الاصطناعي. ويقول: "نحتاج إلى بيئات مفتوحة بالفعل لبناء كيانات ذكية".