تتميز الكثير من الحشرات بخفتها وقوتها في الطيران، ومن أهم أسباب ذلك هو امتلاك معظمها لأربعة أجنحة، مما يمنحها تحكماً دقيقاً في اتجاه الطيران وتوجيه الجسم، وذلك عن طريق تعديل الانحدار والالتفاف والانعراج.
وخلال السنوات الماضية، حاول مختصو ديناميكا الهواء والمهندسون وعلماء الروبوتات تقليد طيران الحشرات ببناء روبوتات طائرة صغيرة، وكانت صعوبة هذا الأمر أهم ما اكتشفوه في عملهم.
يمثل الروبوت روبوبي واحداً من أصغر الآلات الطائرة التي بُنيت على الإطلاق، وقد كان يطير بقوة جناحين مرفرفين، يعتمد كل منهما على مشغل ميكانيكي مستقل خاص به. وبالفعل، لم يتمكن الباحثون من بناء روبوبي لولا تطوير هذه المشغلات الميكانيكية الصغيرة، التي لا يتجاوز وزن كل منها 25 ميلي جرام.
ولكن كانت هناك مشكلة. فمن الناحية النظرية، كان يفترض بجناحي روبوبي المرفرفين أن يكونا قادرين على توليد جميع القوى اللازمة للطيران على نحو يمكن التحكم فيه. ولكن من الناحية العملية، لم تتمكن الآلة من توليد قوى كافية للتحكم في محور الانعراج، ولهذا كانت تتمايل بشكل عشوائي.
ويمثل التصميم رباعي الأجنحة التصميمَ الأفضل، كما في حالة الحشرات الحقيقية، ولكن هذا ممكن فقط إذا كانت المشغلات الميكانيكية أخف بكثير.
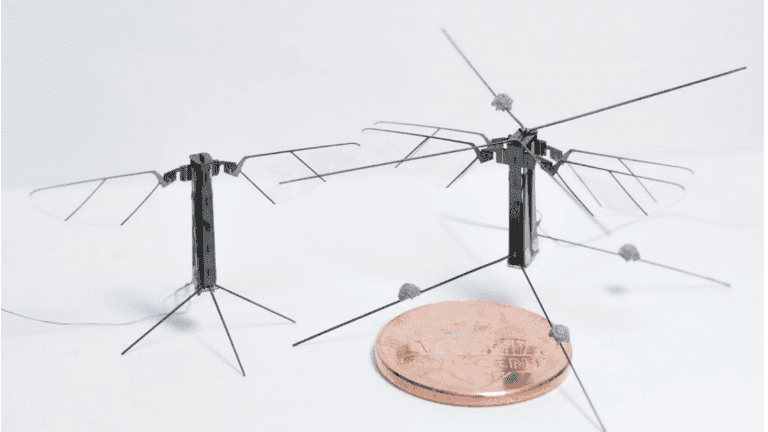
وهنا يأتي دور شيوفينج يانج وزملائه من جامعة ساوثرن كاليفورنيا في لوس أنجلوس؛ فقد قاموا بتطوير مشغلات ميكانيكية بنصف وزن الطرازات السابقة، وقد استخدموا أربعة منها لبناء روبوت بأربعة أجنحة مرفرفة، يصل طول كل منها إلى 33 ميلي متر فقط. أما النتيجة فهي آلة طائرة شبيهة بالحشرة باسم: "بي بلس"، وهي قادرة على الجثوم والهبوط واتباع مسار محدد وتفادي العوائق.
بُني هذا الإنجاز على عمل هندسي حذق؛ حيث إن المشغلات الميكانيكية في روبوبي من 2013 كانت من نوع يُطلق عليه اسم بايمورف (ثنائي التحول)، وهي عبارة عن دعامة مصنوعة من طبقتين من مواد بيزوكهربائية تفصل بينهما طبقة حيادية. وتتقلص الطبقتان الفعالتان بشكل متناوب، مما يجبر الدعامة على التحرك جيئة وذهاباً، ورفرفة الجناحين.
وتتصف هذه المشغلات الميكانيكية ببساطة التركيب وصغر الحجم وخفة الوزن، مما يجعلها مثالية لهذا التطبيق. ويزن مشغلا بايمورف في روبوبي 50 ميلي جرام فقط، وهي نسبة كبيرة من وزن الروبوت بالكامل الذي يصل إلى 75 ميلي جرام.
ولكن يانج وزملاءه وجدوا طريقة لجعلها أكثر خفة، وذلك بالاعتماد على تصميم آخر للمشغلات الميكانيكية باسم يونيمورف (أحادي التحول). وبدلاً من طبقتين من المواد البيزوكهربائية، يعتمد يونيمورف على طبقة واحدة فقط مع طبقة حيادية. ويؤدي التقلص المتكرر للطبقة البيزوكهربائية إلى انحناء الدعامة، ورفرفة الجناح بفعل حركة طرفها.
ويؤدي التصميم أحادي الطبقة إلى جعل المشغلات الميكانيكية أخف وزناً بكثير. وبالفعل، فإن مشغلات يونيمورف الأربعة تزن فقط 56 ميلي جرام، أي أكثر من مشغلي بايمورف ببضعة جرامات، بالإضافة إلى أن استخدام مشغلات يونيمورف يبسِّط من عملية التجميع. يقول الباحثون: "يؤدي التصميم الجديد إلى تخفيض تعقيد عملية التصنيع إلى حد كبير، كما أن التواتر الإحصائي لأخطاء التجميع يقارب ذلك المتعلق بالروبوتات ثنائية الأجنحة".
وبما أن الوزن الإجمالي للروبوت رباعي الأجنحة 95 ميلي جرام، فإن تحميل الجناح أقل بكثير مما في حالة روبوبي، مما يخفف من القوى المطبقة على المشغلات ويزيد من عمرها التشغيلي. يقول أعضاء الفريق: "إن الطريقة المقترحة تتمتع بعدة مزايا من ناحية الوزن والأبعاد والديناميكا الهوائية والتحكم والتصنيع".
ومن مساوئ بي بلس (وروبوتات طائرة مماثلة مثل روبوبي) أنها تحصل على الطاقة عن طريق سلك رابط، وهو ما سمح ليانج وزملائه باستعراض قدرتها على الطيران دون مواجهة مشكلة تخزين الطاقة، وقد عرض آخرون حشرات روبوتية تستمد طاقتها من أشعة الليزر. ولكن مصدر الطاقة المحمول ما زال مسألة صعبة.
يمكنك أن تشاهد عمل بي بلس هنا.
ويبين لنا هذا العمل المثير للاهتمام كم يعتمد التقدم في مجال الروبوتات الشبيهة بالحشرات على التطورات الهندسية، وبالفعل فإن هذا المجال في حاجة ماسة إلى تحقيق تطورات أخرى. وقد يكون بي بلس مبنياً على غرار الحشرات، ولكن وزنه البالغ 95 ميلي جرام يُعتبر هائلاً بالنسبة لوزن الحشرات الحقيقية. حيث إن وزن النحلة لا يتجاوز 10 ميلي جرام، كما أنها لا تحتاج إلى الربط مع مصدر خارجي للطاقة.
ولهذا، يجب على المهندسين أن يُخفضوا من حجم ووزن آلاتهم بمرتبة واحدة على الأقل، وذلك حتى قبل التفكير في مسألة تخزين الطاقة، التي ستكون أكثر صعوبة. ولهذا، فقد نحتاج إلى بعض الوقت قبل أن نرى روبوتات تتمتع بقدرات تضاهي قدرات الحشرات الحقيقية.
مرجع: arxiv.org/abs/1905.02253:
بي بلس: روبوت طائر رباعي الأجنحة على شكل حشرة بوزن 95 ميلي جرام يعمل بقوة أربع مشغلات يونيمورف