ابتكر باحثون من معهد ماكس بلانك للأنظمة الذكية روبوتاً مستوحى من قنديل البحر، يعمل تحت الماء لجمع النفايات والعينات الحيوية دون أن يصدر أي ضوضاء، ودون أن يؤذي البيئة المحيطة، خاصة البيئة الحساسة مثل الشعاب المرجانية.
الروبوتات وجمع البلاستيك من المحيطات
تصل أكوام النفايات، وخاصة البلاستيكية منها، إلى المحيطات وتتراكم هناك كل عام، دون الوصول إلى حل جذري لهذه المعضلة حتى الآن، إلى أن أصبح البلاستيك يشكّل 60% من القمامة البحرية، لكن محاولات التخلص منه مستمرة، وإحدى هذه المحاولات اليوم جاءت من باحثين في معهد ماكس بلانك للأنظمة الذكية، الذين صمموا الروبوت "جيلي فيش بوت" (Jellyfish-Bot) الذي يمكنه التنظيف في النُظم البيئية الحساسة للغاية.
ميزات الروبوت جيلي فيش بوت
جيلي فيش بوت ليس أول روبوت يعمل في التنظيف تحت الماء، لكنه يتميز عن غيره بمرونته وحجمه الصغير بحجم كف اليد، وبعدم وجود المحركات الكهربائية أو المضخات الهيدروليكية الصاخبة، ولا يمكن تمييز صوته عمّا حوله. يتصف الروبوت أيضاً بأنه موفر للطاقة، فهو يعمل بطاقة منخفضة تبلغ نحو 100 ميغاواط. بهذه الطريقة يتفاعل الروبوت بلطفٍ مع بيئته دون إزعاج، مثل الروبوت الطبيعي.
اقرأ أيضاً: باحثون يطوّرون سمكة روبوتية صغيرة تُخلص المحيط من الجزيئات البلاستيكية الدقيقة
مكونات جيلي فيش بوت وآلية عمله
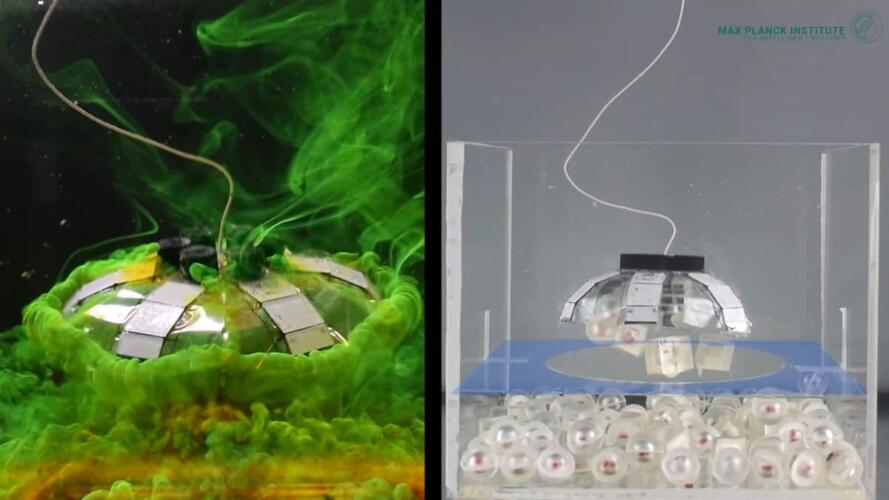
شرح الباحثون آلية عمل هذه الروبوتات في الدراسة المنشورة في دورية ساينتيفك أدفانسس (Scientific Advances)، وأوضحوا أن عمل الروبوت يعتمد على مشغلات كهروهيدروليكية تتدفق من خلالها الكهرباء. تعمل المحركات كعضلات اصطناعية لتشغيل الروبوت. تحيط بهذه العضلات وسائد هوائية بالإضافة إلى مكونات صلبة وناعمة تعمل على استقرار الروبوت وتجعله مقاوماً للماء. بهذه الطريقة، لا يمكن للجهد العالي الذي يمر عبر المشغلات أن يتصل بالمياه المحيطة. يوفّر مصدر الطاقة الكهرباء بشكلٍ دوري من خلال أسلاك رفيعة، ما يؤدي إلى تقلص العضلات وتوسعها، وبالتالي يمكن للروبوت السباحة برشاقة وتشكيل دوامات تحت جسمه.
استوحى الباحثون هذه الآلية من قناديل البحر، إذ يقول "تيانلو وانغ" باحث ما بعد الدكتوراة في معهد ماكس بلانك، والمؤلف الرئيسي للدراسة: "عندما يسبح قنديل البحر لأعلى، يمكنه أن يحبس الأشياء على طول مساره لأنه يخلق تيارات حول جسمه. وبهذه الطريقة، يمكنه أيضاً جمع العناصر الغذائية.
اقرأ أيضاً: كيف يمكن للنحل الروبوتي وخلايا النحل الروبوتية أن تساعدا النحل على الصمود؟
يقوم الروبوت أيضاً بتدوير الماء حوله، هذه الوظيفة مفيدة في جمع الأشياء مثل جزيئات النفايات، ويمكنه بعد ذلك نقل القمامة إلى السطح، حيث يمكن إعادة تدويرها لاحقاً، كما أنه قادر على جمع العينات البيولوجية الهشة مثل بيض السمك. وفي الوقت نفسه، لا يترك أثراً سلبياً على البيئة المحيطة.
يتكون الروبوت من عدة طبقات، يعمل بعضها على تقوية الروبوت، ويعمل بعضها الآخر على بقائه طافياً أو يعزله عن المحيط. تعمل طبقة بوليمر أخرى كجلد عائم، ويتم دمج العضلات الاصطناعية التي تعمل بالطاقة الكهربائية في منتصف الطبقات المختلفة، وهذه العضلات الاصطناعية هي عبارة عن أكياس بلاستيكية مملوءة بالعوازل السائلة ومغطاة جزئياً بأقطاب كهربائية.
يؤدي تطبيق جهد عالٍ عبر قطب كهربائي إلى شحنه بشحنة إيجابية، بينما يتم شحن المياه المحيطة بشحنة سلبية، ما يولّد قوة تدفع الزيت داخل الأكياس ذهاباً وإياباً. يتسبب ذلك في انقباض الأكياس واسترخائها، على غرار العضلة الحقيقية. يمكن أن تتحمل أيضاً الضغوط الكهربائية العالية الناتجة عن الأقطاب الكهربائية المشحونة وتبقى محمية ضد الماء بواسطة طبقة عازلة.
يمتلك الروبوت 6 أذرع، تعمل بشكل مجموعات منفصلة، تعمل 4 منها كمروحة، و2 كقابض، ما سمح للروبوت بالإمساك الدقيق بسهولة.
يمكن أيضاً تشغيل مجموعة فرعية فقط من الذراعين، من أجل توجيه الروبوت في اتجاهات مختلفة. بالإضافة إلى ذلك، يمكن أن يعمل روبوتان معاً للإمساك بشيء واحد، أو أن يحملا حملاً ثقيل الوزن نسبياً.
اقرأ أيضاً: اكتشاف فطريات تفكك البلاستيك الذي لا يعاد تدويره خلال أشهر
تبقى أمام الباحثين مشكلة واحدة هي أن الروبوت يبقى متصلاً بسلك ليتزود بالطاقة ويعمل، على الرغم من أن الباحثين تمكنوا من دمج وحدات البطارية والاتصالات اللاسلكية في الروبوتات، لكن لا يمكن حالياً توجيهه في المسار المطلوب.